PWM
PWM为脉冲宽度调制,可输出一路可调不同占空比大小的脉冲
外设特性
五通道PWM
支持占空比模式,呼吸模式,软件模式,PDM模式,DTC模式
其中软件模式中支持单端,差分,classD,翻转输出模式
软件模式支持DMA搬运数据
软件模式支持DMA搬运数据
DTC模式总共有6路PWM输出
功能描述及使用
所有模式都是以不同方式输出不同周期占空比的脉冲
占空比,呼吸,软件,PDM模式都是由同一地址寄存器PWM_CTL控制
只有PWM0通道支持软件模式和PDM模式
当PWM0通道作软件模式的差分和classD方式输出时,硬件上将占用PWM1(不需要软件配置PWM1通道,只需指定PWM1通道的GPIO)
所有模式都存在两个比特,通道使能和通道输出使能比特去控制通道的输出,当只置位通道使能,不置位通道输出使能,通道将按照idle_polarity输出高低电平
工作时钟
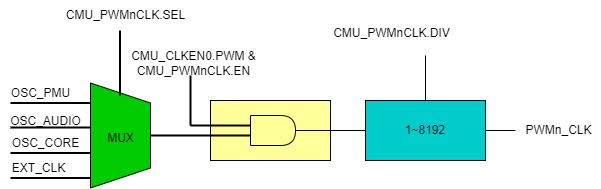
五通道PWM时钟单独配置
PWM0~PWM3通道时钟分别由PWM0CLK~PWM3CLK控制,DTC模式由PWM4CLK控制
各时钟源的及配置与使能参看时钟配置模块
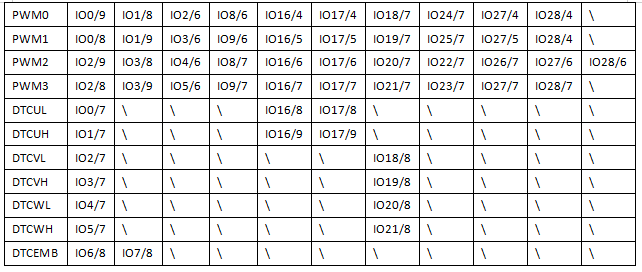
输出IO
GPIO作为PWM通道的输出复用,需要配置GPIO功能复用
配置接口为DEV_GPIO->CTL[gpio_x] = gpio_mfp
gpio_x为GPIO口的序号,gpio_mfp为功能复用号,PWM在GPIO上的复用见下表
IOx表示GOIO口,/x表示GPIO功能复用号
占空比模式
PWM0~PWM3支持占空比模式
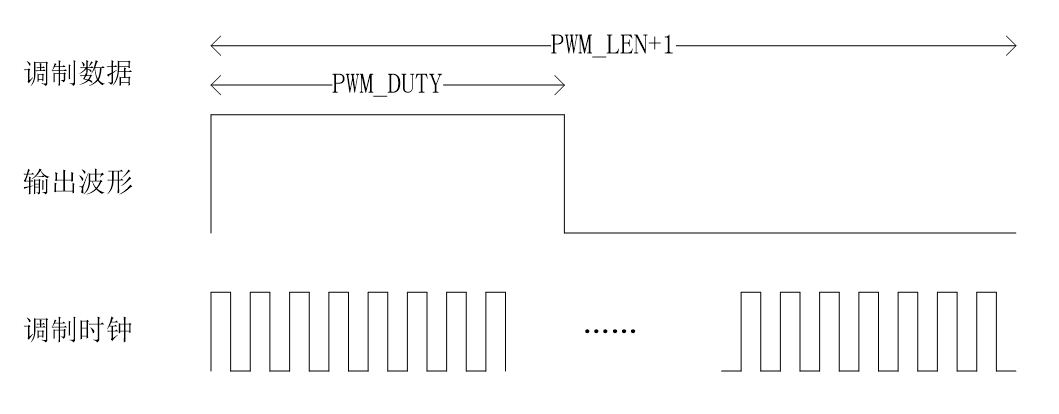
普通PWM输出模式,可以修改周期和占空比
由两个参数控制,一个参数控制PWM的周期,由PWM_CTL.PWM_LEN比特域指定,一个参数控制PWM的占空比,由PWM_CTL.PWM_DUTY比特域指定。两参数的单位都是PWM通道的工作时钟
由于由PWM_CTL.PWM_LEN比特域只有8bit,最大输出PWM周期为256;PWM_CTL.PWM_DUTY比特域由9bit,但值范围只能0~256
当未置位通道输出使能比特时,会输出空闲极性,由PWMn_CTL.PWM_IDP控制
使用
1. 使能PWM模块,并配置通道时钟
置位CMU_CLKEN0.PWM,开启PWM模块时钟
置位RMU_RSTEN0.PWM,释放PWM模块
配置CMU_PWMnCLK寄存器,选择通道工作时钟源,并打开通道工作时钟
2. 配置PWMn_CTL,配置占空比模式参数
配置PWMn_CTL.MODE,值设定为0,意为通道以占空比模式运行
配置PWMn_CTL.PWM_IDP指定未置位通道输出使能比特时,通道输出的电平极性。值为0表示输出低电平,置位1表示输出高电平
配置PWMn_CTL.LEN比特域,指定通道输出PWM的周期,单位为通道的工作时钟
配置PWMn_CTL.DUTY比特域,指定通道输出PWM的高电平个数,单位为通道的工作时钟
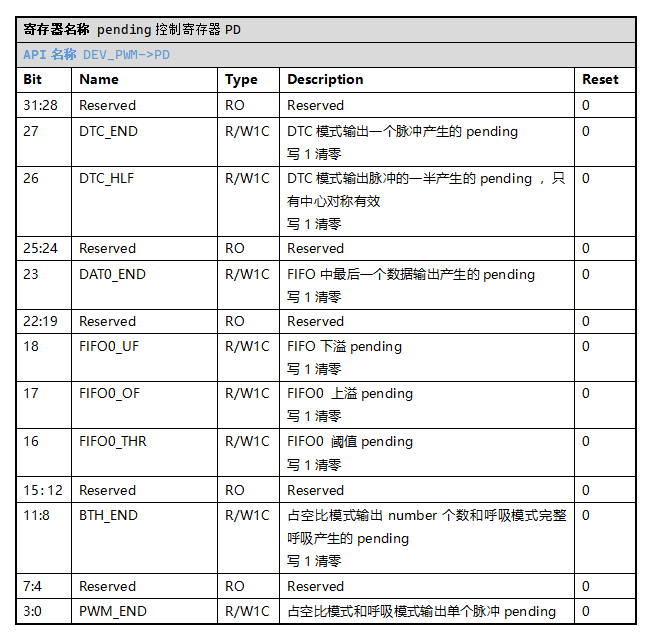
配置PWMn_CTL.NUM比特域,指定通道输出PWM个数后,产生PWM_PD.BTH_END的值
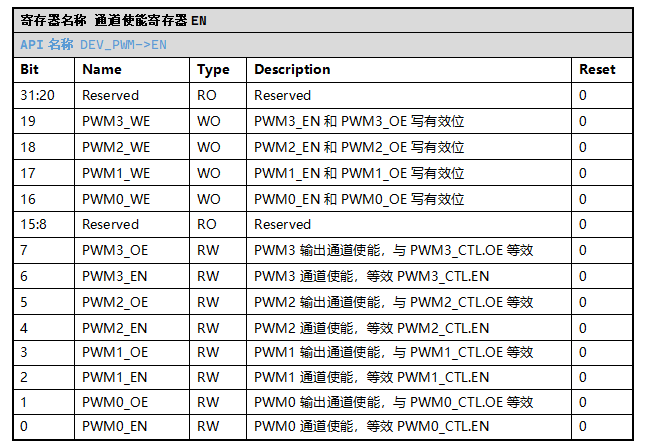
配置PWMn_CTL.EN比特,值设为1,使能通道
3. 使能通道输出
配置PWMn_CTL.PWM_OE,值设为1,使能通道输出
4. 修改PWM
根据实际情况修改PWMn_CTL.LEN和PWMn_CTL.DUTY输出不同PWM
呼吸模式
PWM0~PWM3支持该模式
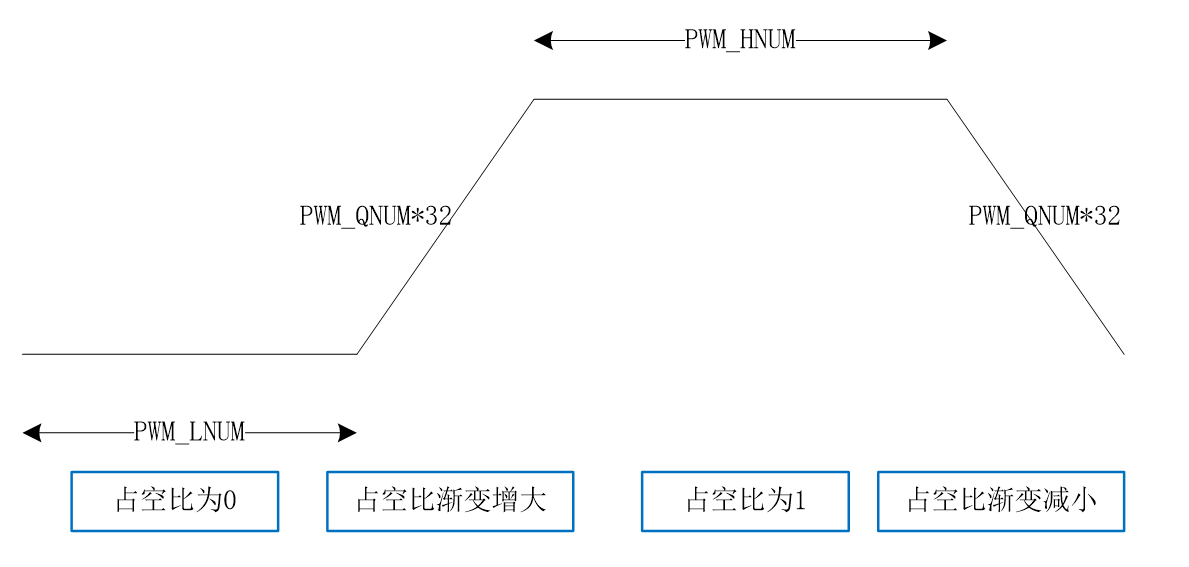
呼吸模式本质仍是不同占空比的PWM输出,由三个参数指定。输出时,先输出一定数量占空比为0%的PWM,数量由参数PWMn_CTL.PWM_LNUM指定;再输出一定数量由%0占空比逐步升到100%占空比的PWM,数量由参数PWMn_CTL.PWM_QNUM指定;再输出一定数量100%占空比的PWM,数量由参数PWMn_CTL.PWM_HNUM指定,最后,输出一定数量由100%逐步降到0%占空比的PWM,数量由参数PWMn_CTL.PWM_QNUM指定。如此往复输出。当由100%降到0%时,产生PWM_PD.BTH_PD,即一个完整呼吸
输出的PWM周期固定为256,单位为通道的工作时钟
使用
1. 使能PWM模块,并配置通道时钟
置位CMU_CLKEN0.PWM,开启PWM时钟
置位RMU_RSTEN0.PWM,释放PWM模块
配置CMU_PWMnCLK寄存器,选择通道工作时钟源,并打开通道工作时钟
2. 配置PWMn_CTL,配置软件模式参数
配置PWMn_CTL.MODE,值设定为1,意为通道以呼吸模式运行
配置PWMn_CTL.PWM_IDP指定未置位通道输出使能比特时,通道输出的电平极性。值为0表示输出低电平,置位1表示输出高电平
配置PWMn_CTL.QNUM比特域,指定从满低电平到满高电平和从满低电平到满高低电平PWM个数,实际个数加一再乘以32
配置PWMn_CTL.LNUM比特域,指定满低电平PWM个数,实际个数加一
配置PWMn_CTL.HNUM比特域,指定满高电平PWM个数,实际个数加一
配置PWMn_CTL.EN比特,值设为1,使能通道
3. 使能通道输出
配置PWMn_CTL.PWM_OE,值设为1,使能通道输出
4. 修改PWM
根据实际情况修改PWMn_CTL.QNUM和PWMn_CTL.LNUM,PWMn_CTL.HNUM输出不同PWM
软件模式
只有PWM0支持该模式。配置由通道PWM0控制,但可能多占用PWM1通道输出,后续描述此现象
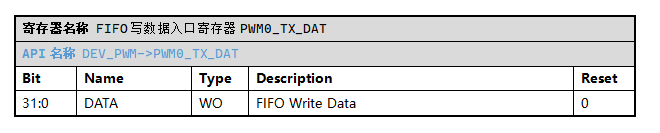
此模式下,PWM的参数设定更加细致,配置更为灵活,功能更全面。输出的数据由PWM0_TX_DAT填入,且PWM0_TX_DAT是数据FIFO的入口地址,FIFO深度为8。该模式下,又可分为四个不同的输出模式,即在同样的PWM参数配置下,可以以不同形式输出PWM。
四种输出模式分别为单端,翻转,差分,classd,其中单端模式和翻转模式,只有PWM0通道输出脉冲;差分和classd硬件自动占用PWM1(不需要软件配置,只需要使能GPIO的复用),从PWM0和PWM1通道上输出脉冲
下图为各输出模式与部分参数的关系输出图
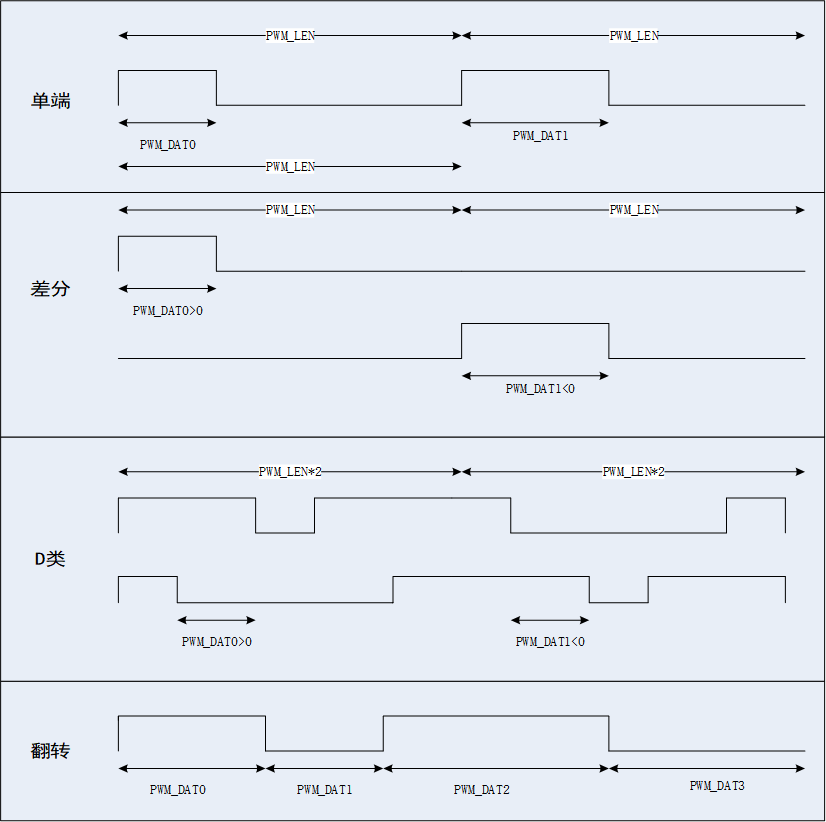
单端

只在PWM0通道上输出PWM波形,PWM0_TX_DAT指定一个脉冲周期中,高电平占时钟的个数,且只有正数对应的值
翻转

只在PWM0通道上输出PWM波形,PWM0_TX_DAT交替指定高电平占时钟个数和低电平占时钟个数。且只有正数对应的值。适合红外输出
差分

会在PWM0通道和PWM1通道上输出,PWM1由硬件打开,软件上不用配置,PWM0_TX_DAT中有效数据指定脉冲周期中,高电平占时钟个数,单位为PWM0通道的工作时钟。数据认为有正有负,当值为正数时,在PWM0通道上输出,当 值为负数时,在PWM1通道上输出,PWM0_TX_DAT中有效数据的绝对值指定脉冲周期中,高电平占时钟个数。
ClassD

会在PWM0通道和PWM1通道上输出,PWM1由硬件打开,软件上不用配置,PWM0_TX_DAT中有效数据指定PWM0通道与PWM1通道上高电平占时钟个数的差。数据有正负,当值为正数时,在脉冲周期中PWM0通道比PWM1通道多的高电平占时钟个数,当值为负数时,在脉冲周期中PWM0通道比PWM1通道少的高电平占时钟个数。
使用
1. 使能PWM模块,并配置通道时钟
置位CMU_CLKEN0.PWM,开启PWM时钟
置位RMU_RSTEN0.PWM,释放PWM模块
配置CMU_PWM0CLK寄存器,选择通道工作时钟源,并打开通道工作时钟。
PWM0CLK时钟可以设置占空比,不以方波形式输出,当置位DUTY_MODE,DUTY_VAL的值指定低电平的占分频的个数
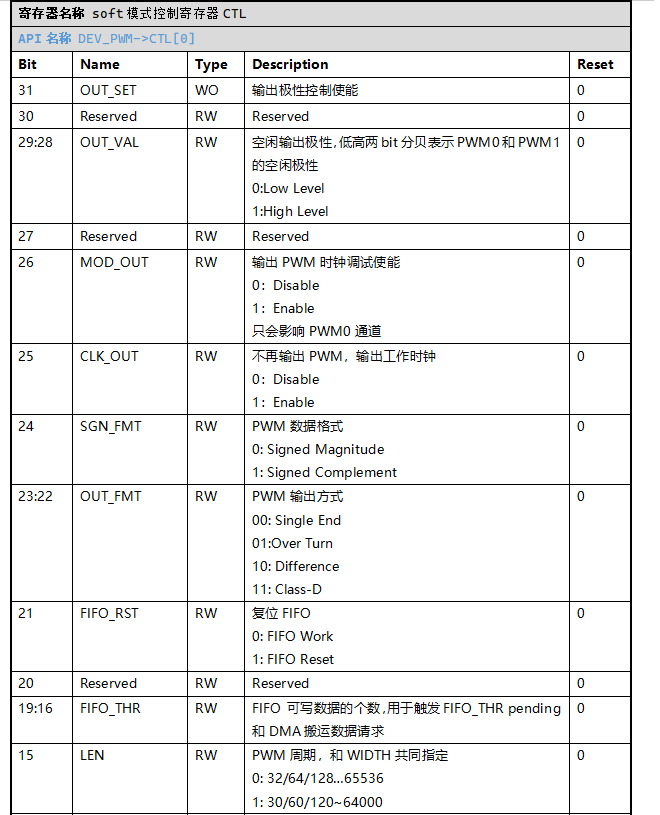
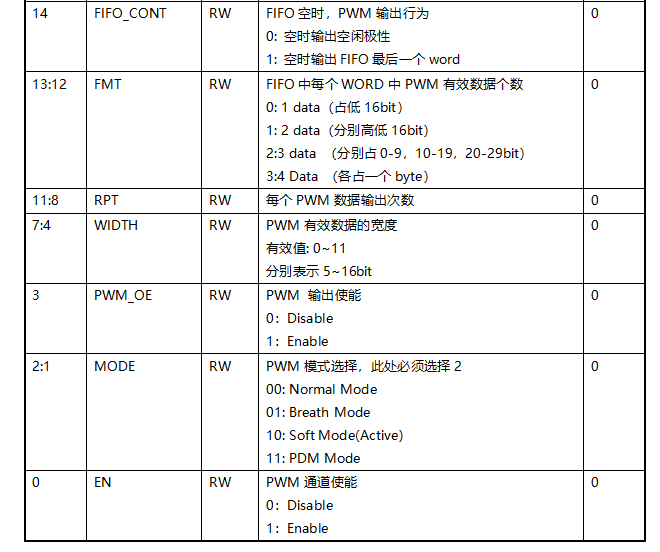
2. 配置PWM0_CTL,配置软件模式参数
配置PWM0_CTL.MODE,值设定为2,意为通道以软件模式方式运行
配置PWM0_CTL.OUT_SET和PWM0_CTL.OUT_VAL,指定idle_polarity。当PWM0_CTL.OUT_SET值为1,PWM0_CTL.OUT_VAL低和高两个比特分别指定PWM0通道和PWM1通道空闲时的输出极性;当PWM0_CTL.OUT_SET值为0,PWM0_CTL.OUT_VAL值无效
配置PWM_CTL.OUT_FMT,指定输出模式,值为0表示单端输出模式,值为1表示翻转输出模式,值为2表示差分输出模式,置位3表示classD输出模式
配置PWM0_CTL.WIDTH,指定PWM0_TX_DAT有效数据比特宽度,0~11分别指5~16比特的有效数据宽度
配置PWM0_CTL.LEN,指定PWM的周期,实际值与PWM0_CTL.WIDTH共同决定。具体为,当PWM0_CTL.LEN设定为0,PWM0_CTL.WIDTH值0~11,周期分别为32、64、128、256、512、1024、2048、4096、8192、16384、32768、65536;当PWM0_CTL.LEN设定为1,PWM0_CTL.WIDTH值0~11,周期分别为30、60、120、250、500、1000、2000、4000、8000、16000、32000、64000
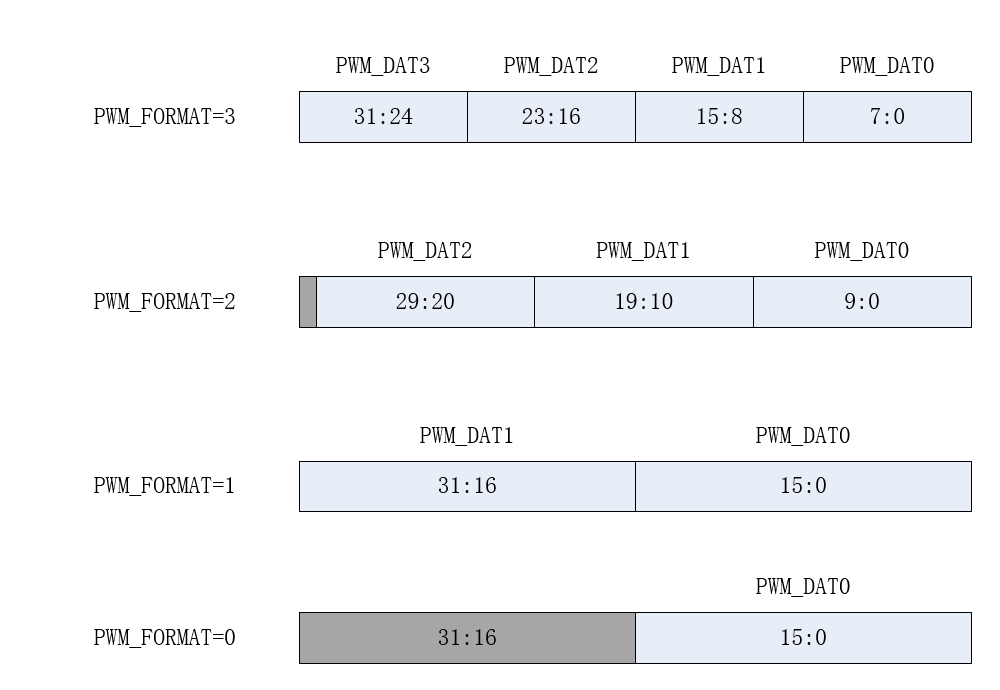
配置PWM0_CTL.FMT,指定PWM0_TX_DAT中有效数据的个数,0~3分别指1-4个有效数据
配置PWM0_CTL.SGN_FMT,指定PWM0_TX_DAT中有效数据的符号格式,值为0表示最高位表示符号位,值为1表示补码形式表示符号。注意:最高位不是值有效比特的最高位,而是与PWM0_CTL.FMT有关,是在下图中每个数据的最高位
配置PWM0_CTL.FIFO_CONT,指定当PWM0_TX_DAT对应FIFO数据全部输出完毕,即空的时候,PWM0通道输出行为,当值为0,就停止输出,进入IDLE。输出idle_polarity的值,当值为1,继续输出FIFO最后一个word的值(注意是最后一个word的值,不是最后一个有效数据的值)
配置PWM0_CTL.FIFO_THR,指定PWM0_TX_DAT的FIFO阈值,用于触发PWM_PD.FIFO_THR,当FIFO中剩余数据小于等于设定阈值时,产生pending。注意FIFO深度为8。不能为0
配置PWM0_CTL.RPT,指定每个有效数据在通道输出时的重复次数,即一个有效数据被重复输出的次数。值0-15分别表示1-16次输出
配置PWM0_CTL.MOD_OUT设定输出PWM是否加上时钟调试。0表示不加上时钟调制,值未1,表示输出加上时钟调制
配置PWM0_CTL.EN,值为1使能通道
3. 使能通道输出
配置PWM0_CTL.PWM_OE使能通道输出
4. 填入数据
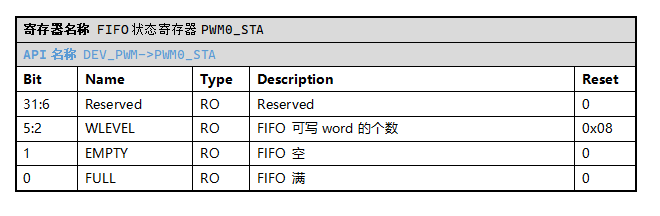
读取PWM0_STA.FULL。若未置位,通过PWM0_TX_DAT向FIFO中填入数据
PDM模式
只有PWM0支持该模式
PDM模式是将PWM0_TX_DAT的数据,直接按数据比特的方式从PWM0通道输出
使用
1. 使能PWM模块,并配置通道时钟
置位CMU_CLKEN0.PWM,开启PWM时钟
置位RMU_RSTEN0.PWM,释放PWM模块
配置CMU_PWM0CLK寄存器,选择通道工作时钟源,并打开通道工作时钟
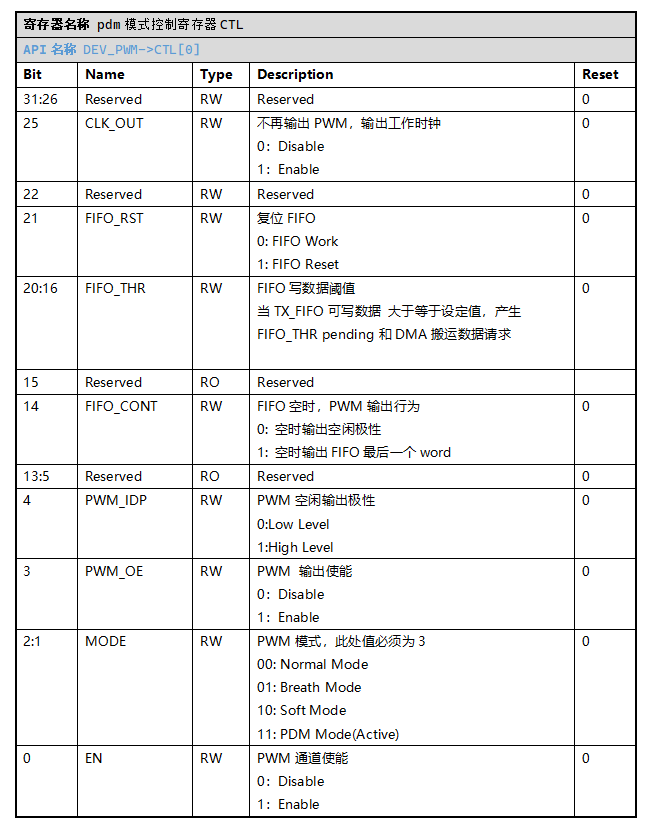
2. 配置PWM0_CTL,配置PDM模式参数
配置PWM0_CTL.MODE,值设为3,设置通道工作模式为PDM模式
配置PWM0_CTL.PWM_IDP,设置通道空闲时的输出极性,0表示空闲输出低电平,1表示空闲输出高电平
配置PWM0_CTL.FIFO_THR,设定PWM0_TX_DAT的FIFO阈值,当FIFO中剩余数据小于等于设定值时,产生PWM_PD.FIFO_THR
配置PWM0_CTL.FIFO_CONT,设定FIFO空时,PWM输出行为,当值设为0,FIFO空时,PWM输出PWM_IDP设定值。当值设为1,FIFO空时输出FIFO中最后一个word的数据
置位PWM0_CTL.EN,设为1,使能通道
3. 使能通道输出
配置PWM0_CTL.PWM_OE,值设未1,使能通道输出
填入数据
读取PWM0_STA.FULL。若未置位,通过PWM0_TX_DAT向FIFO中填入数据
DTC模式
只有PWM4支持该模式,即DTC
该模式为3对即共6路PWM输出通道构成,3对输出命名分别为U、V、W,由一个参数控制输出周期,由三个不同参数控制占空比,每对输出通道由H、L两路输出通道构成。用于驱动三项电机。
假定驱动电路原理图如下
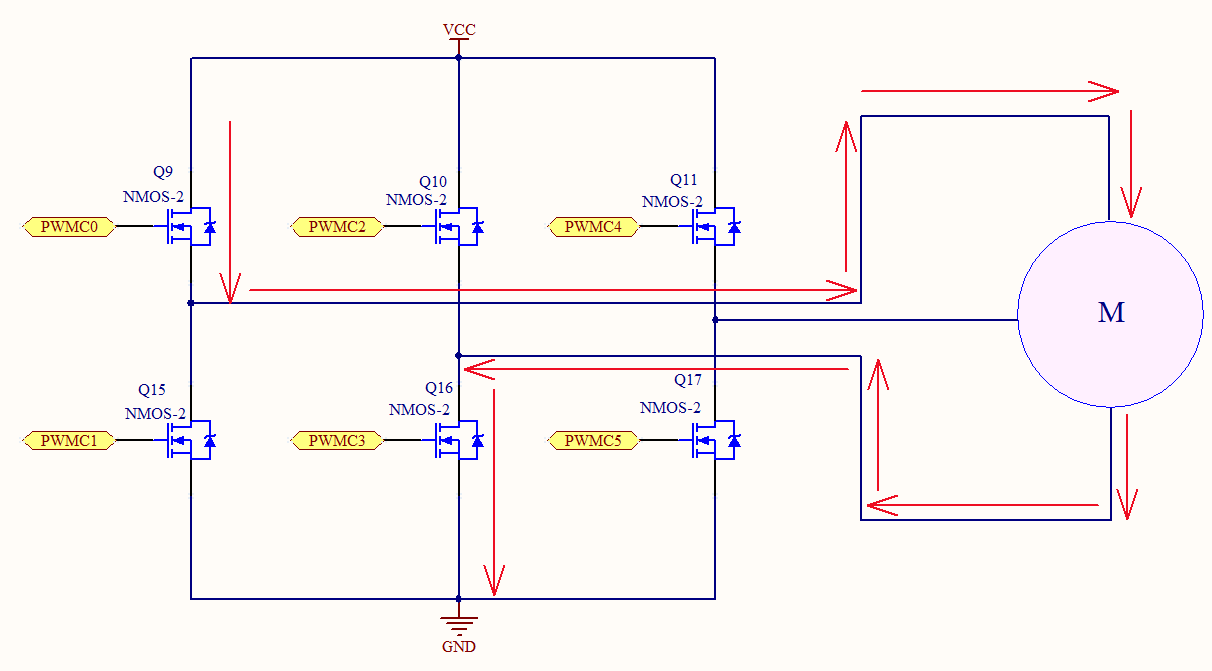
PWMC0,PWMC1为通道U
PWMC2,PWMC3为通道V
PWMC4,PWMC5为通道W
每对输出通道默认互补,可以配置输出反向,使输出相同。
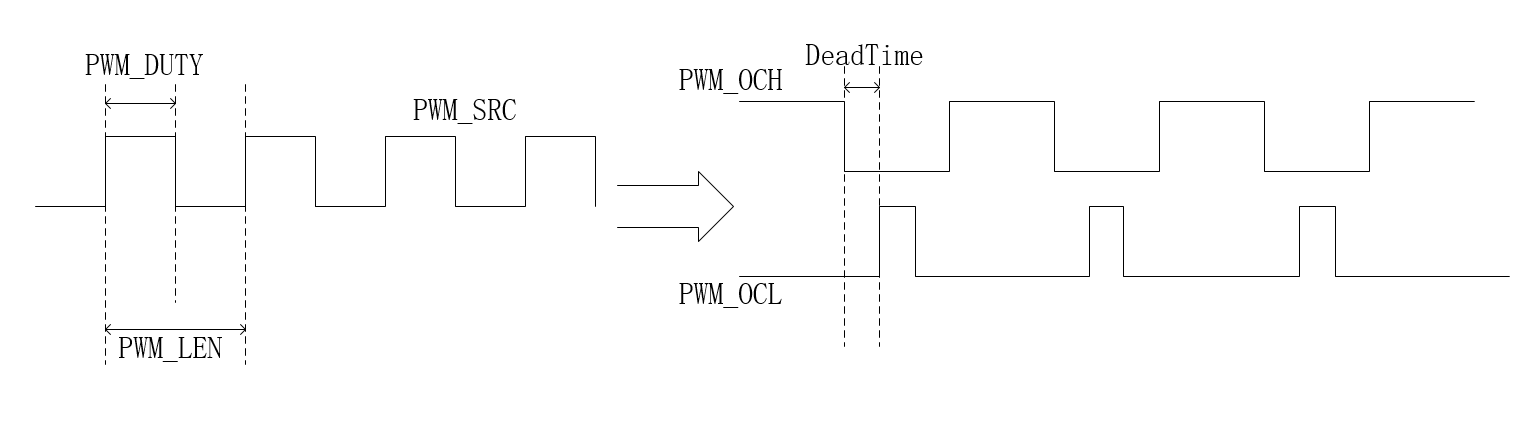
支持死区时间设置
为了避免每对通道输出的PWM,不会同时导通一路上下mos管,可以添加死区时间
单对输出示意图如下图
支持急刹功能。可以通过指定急刹控制GPIO,当GPIO上有指定电平时,停止输出PWM,当GPIO上指定电平变化,重新以一个完整的PWM继续输出。
使用
1. 使能PWM模块,并配置通道时钟
置位CMU_CLKEN4.PWM,开启PWM时钟
置位RMU_RSTEN4.PWM,释放PWM模块
配置CMU_PWM4CLK寄存器,选择通道工作时钟源,并打开通道工作时钟
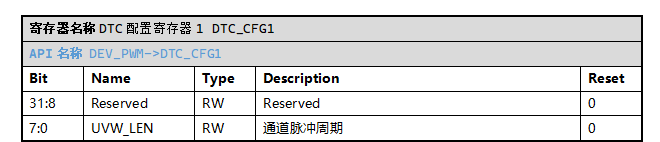
2. 配置周期
配置PWM_DTC_CFG1,设定U、V、W通道的周期
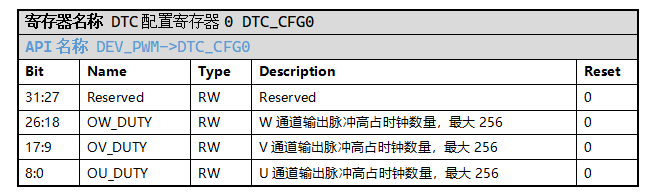
3. 配置占空比
配置PWM_DTC_CFG0,分别设定U、V、W通道的占空比
4. 配置空闲极性
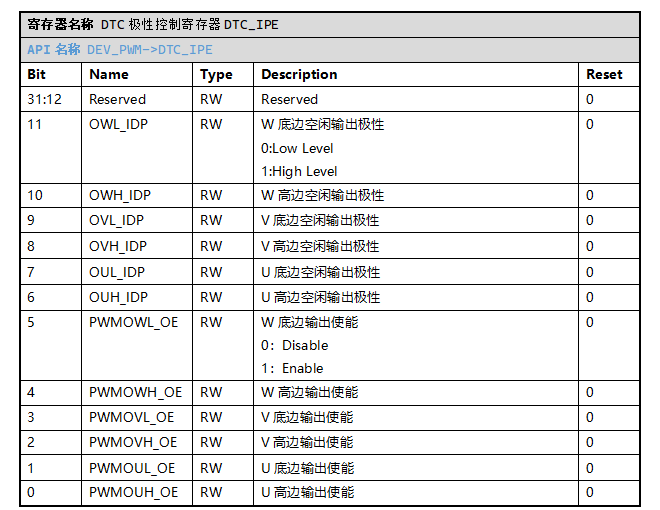
配置PWM_DTC_IPE.Oxx_IDP,指定各输出通道的空闲极性,0表示空闲输出低,1表示空闲极性为高
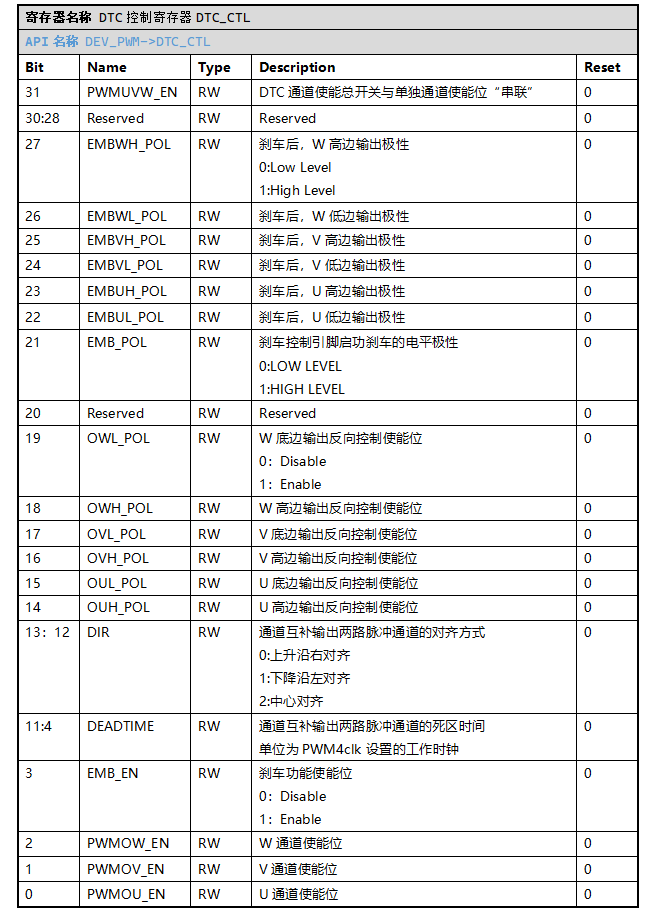
5. 配置PWM_DTC_CTL
配置PWMUVW_EN比特,使能通道
配置Oxx_POL比特,设定极性翻转输出,1表示翻转输出极性,0表示不反转。xx的含义:第一个x用U、V、W替换,代表通道,第二个x用L、H替换,代表各通道下互补的输出PWM
配置DIR和CNT_MODE比特,设置一对通道输出的对齐方式,当CNT_MODE值为1,为中心对齐方式;当CNT_MODE为0且DIR值为0,表示上升沿右对齐;当CNT_MODE为0,且DIR值为1,表示下降左沿对齐
配置EMBxx_POL比特,指定各通道,在刹车后输出的极性,1表示刹车首输出高电平,0表示刹车后输出低电平。xx的含义:第一个x用U、V、W替换,代表通道,第二个x用L、H替换,代表各通道下互补的输出PWM
配置EMB_POL比特,指定启动刹车时,控制引脚电平的极性。0表示控制引脚为低电平时刹车,1表示控制引脚为高时刹车
配置EMB_EN比特,0表示关闭刹车功能,1表示打开刹车功能
配置PWMxx_EN比特,置位1,使能各路PWM。xx的含义:第一个x用U、V、W替换,代表通道,第二个x用L、H替换,代表各通道下互补的输出PWM
6. 配置输出极性
配置PWM_DTC_IPE.PWMOxx_OE比特,使能通道输出。xx的含义:第一个x用U、V、W替换,代表通道,第二个x用L、H替换,代表各通道下互补的输出PWM
7. 修改输出
根据实际情况修改PWM_DTC_CFG1和PWM_DTC_CFG0的值,输出不同周期占比的PWM
API说明
API接口将PWM模块重新按功能分为3个模块–PWM、SWM、DTC
PWM 模块为占空比模式和呼吸软件模式
SWM 模块为软件模式和PDM模式
DTC 模块为DTC模式
- 注意
SWM模式和PWM0不可同时启用;当SWM选择差分或classd方式输出,硬件还会继续占用PWM1,故此时PWM1也不能使用
PWM模块
简介
支持占空比模式和呼吸模式的配置,
支持单个PWM输出和多个PWM输出中断的管理
-
enum pwm_channel_t
PWM通道枚举
PWM0: PWM通道0
PWM1: PWM通道1
PWM2: PWM通道2
PWM3: PWM通道3
- 说明
枚举为了方便可以通道同时初始化,关闭等功能而设计,即函数通道参数可以使用枚举成员或运算表示同时配置多个通道
-
enum pwm_source_clk_t
PWM通道时钟源
PWM_Clock_OSCPMU: 32kHz时钟
PWM_Clock_OSCAUDIO: 49.152MHz时钟
PWM_Clock_OSCCORE: corepll时钟,大小由corepll配置决定,参看时钟配置模块 XX
PWM_Clock_EXTCLK: 外部输入时钟
-
enum pwm_it_type_t
PWM通道中断
PWM_Period_IT: 单个PWM输出中断
PWM_Number_IT: 多个PWM输出中断。对于占比模式需要配置NUMBER,对于呼吸模式,整个呼吸过程产生该中断
- 说明
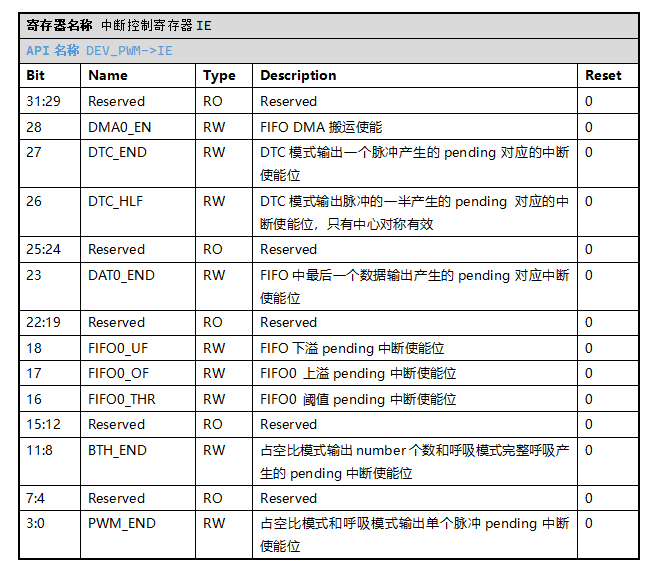
PWM_Period_IT表示占空比模式和呼吸模式,输出单个PWM时,产生的pending, 若使能该中断,将进入对应中断服务函数
PWM_Number_IT在占空比模式,表示配置的PWM_CTL.NUMBER个的PWM输出产生的pending,在呼吸模式,表示一个完整的“呼吸”,即0%占空比到100%占空比,再回到0%占空比一个完成的过程,产生的pending
pending 的产生,与中断的使能没有关系。两中断的中断服务函数是同一函数入 口,需要在中断服务函数中判断触发中断的pending
-
void pwm_clock_set(pwm_channel_t PWMx, pwm_source_clk_t source_clk, uint32_t div)
PWM通道时钟设置
- 参数
PWMx – PWM通道号 参数范围pwm_channel_t,可选PWM0,PWM1,PWM2,PWM3
source_clk – source_clk可选时钟源,参数选pwm_source_clk_t
div – 时钟分频系数,范围1-8192
- 返回
无
-
void pwm_duty_mode_init(pwm_channel_t PWMx, uint32_t period, uint32_t duty, soc_set_t idle_polarity, uint32_t number);
PWM通道占空比模式初始化
- 参数
PWMx – PWM通道号 参数范围pwm_channel_t,可选PWM0,PWM1,PWM2,PWM3
period – PWM 周期cycles,参数范围1-256
duty – PWM 高电平cycles,参数范围0-256
idle_polarity – 未调用pwm_start函数时,PWM输出极性,范围soc_set_t
number – 产生PWM_Number_IT的PWM输出数量,范围1-64
- 返回
无
-
void pwm_duty_mode_set(pwm_channel_t PWMx, uint32_t period, uint32_t duty)
PWM通道占空比模式参数设置
- 参数
PWMx – PWM通道号 参数范围pwm_channel_t,可选PWM0,PWM1,PWM2,PWM3
period – PWM 周期cycles,参数范围1-256
duty – PWM 高电平cycles,参数范围0-256
- 返回
无
-
void pwm_breath_mode_init(pwm_channel_t PWMx, uint32_t h_num, uint32_t l_num, uint32_t q_num, soc_set_t idle_polarity)
PWM通道呼吸模式初始化
- 参数
PWMx – PWM通道号 参数范围pwm_channel_t,可选PWM0,PWM1,PWM2,PWM3
h_num – PWM 满高电平输出个数,参数范围1-256
l_num – PWM 满低电平输出个数,参数范围1-256
q_num – 从满低电平到满高电平和从满低电平到满高低电平个数,设置值1-16,实际个数再乘以32
idle_polarity – 未调用pwm_start函数时,PWM输出极性,范围soc_set_t
- 返回
无
-
void pwm_breath_mode_set(pwm_channel_t PWMx, uint32_t h_num, uint32_t l_num, uint32_t q_num)
PWM通道呼吸模式参数设置
- 参数
PWMx – PWM通道号 参数范围pwm_channel_t,可选PWM0,PWM1,PWM2,PWM3
h_num – PWM 满高电平输出个数,参数范围1-256
l_num – PWM 满低电平输出个数,参数范围1-256
q_num – 从满低电平到满高电平和从满低电平到满高低电平个数,设置值1-16,实际个数再乘以32
- 返回
无
-
void pwm_deinit(pwm_channel_t PWMx)
PWM通道去初始化
- 参数
PWMx – PWM通道号 参数范围pwm_channel_t,可选PWM0,PWM1,PWM2,PWM3
- 返回
无
-
void pwm_start(pwm_channel_t PWMx)
PWM通道开始输出pwm
- 参数
PWMx – PWM通道号 参数范围pwm_channel_t,可选PWM0,PWM1,PWM2,PWM3
- 返回
无
-
void pwm_abort(pwm_channel_t PWMx)
PWM通道停止输出pwm
- 参数
PWMx – PWM通道号 参数范围pwm_channel_t,可选PWM0,PWM1,PWM2,PWM3
- 返回
无
-
void pwm_irq_enable(pwm_channel_t PWMx, pwm_it_type_t it_type)
PWM通道中断使能
- 参数
PWMx – PWM通道号 参数范围pwm_channel_t,可选PWM0,PWM1,PWM2,PWM3
it_type –
中断类型,参数范围pwm_it_type_t
PWM_Period_IT: 单个PWM输出中断
PWM_Number_IT: 多个PWM输出中断,对于占比模式需要配置NUMBER,对于呼吸模式,整个呼吸过程产生该中断
- 返回
无
-
void pwm_irq_disable(pwm_channel_t PWMx, pwm_it_type_t it_type)
PWM通道中断失能
- 参数
PWMx – PWM通道号 参数范围pwm_channel_t,可选PWM0,PWM1,PWM2,PWM3
it_type –
中断类型,参数范围pwm_it_type_t
PWM_Period_IT: 单个PWM输出中断
PWM_Number_IT: 多个PWM输出中断,对于占比模式需要配置NUMBER,对于呼吸模式,整个呼吸过程产生该中断
- 返回
无
-
soc_set_t pwm_irq_get_flag(pwm_channel_t PWMx, pwm_it_type_t it_type)
获取PWM通道中断pending
- 参数
PWMx – PWM通道号 参数范围pwm_channel_t,可选PWM0,PWM1,PWM2,PWM3
it_type –
中断类型,参数范围pwm_it_type_t
PWM_Period_IT: 单个PWM输出中断
PWM_Number_IT: 多个PWM输出中断,对于占比模式需要配置NUMBER,对于呼吸模式,整个呼吸过程产生该中断
- 返回
pending状态
- 返回值
Reset – pending未置位
Set – pending置位
-
void pwm_irq_clear_flag(pwm_channel_t PWMx, pwm_it_type_t it_type)
清除PWM通道中断pending
- 参数
PWMx – PWM通道号 参数范围pwm_channel_t,可选PWM0,PWM1,PWM2,PWM3
it_type –
中断类型,参数范围pwm_it_type_t
PWM_Period_IT: 单个PWM输出中断
PWM_Number_IT: 多个PWM输出中断,对于占比模式需要配置NUMBER,对于呼吸模式,整个呼吸过程产生该中断
- 返回
无
-
void pwm_irq_handler()
PWM中断处理函数
- 返回
无
- Note
需要在pwm_irq_entry中调用
- Note
弱函数,用户可再定义同名函数
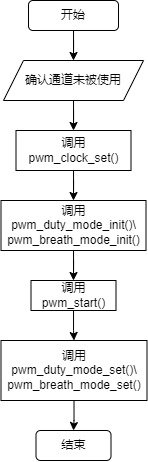
使用
确认通道未被使用
pwm_clock_set(PWMx,source_clk,div)设置通道时钟
调用pwm_duty_mode_init()或pwm_breath_mode_init()初始化通道
调用pwm_start(PWMx)使通道开始输出pwm
根据情况调用pwm_duty_mode_set()或pwm_breath_mode_set()修改通道参数
寄存器定义
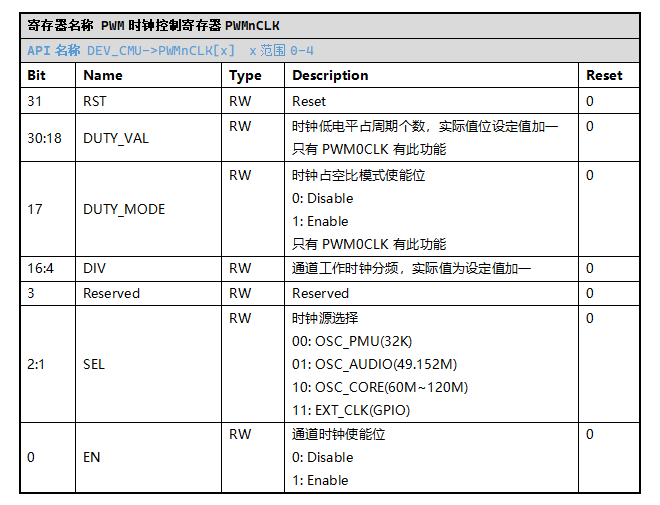
PWMnCLK
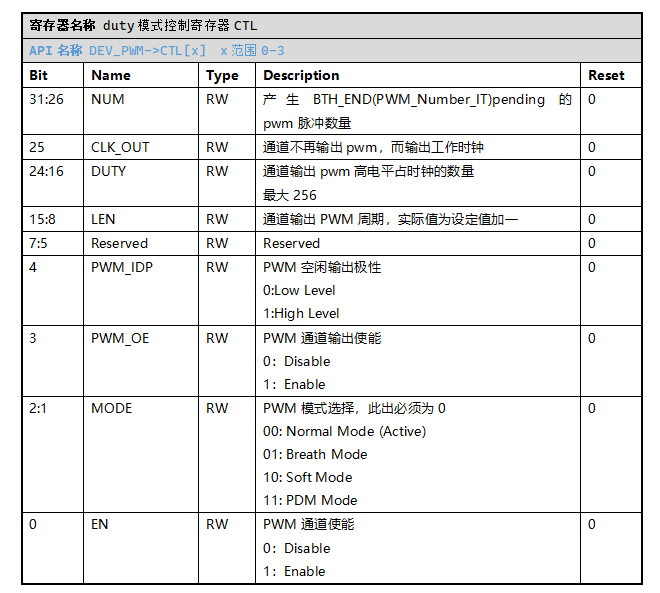
duty CTL
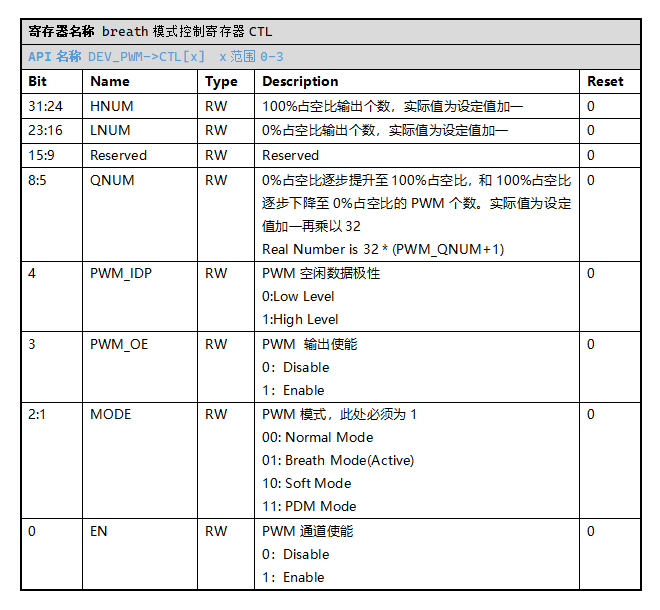
breath CTL
soft CTL